
Senior Robotics Research Scientist
MathWorks Advanced Research & Technology Office
amavromm (at) mathworks.com
Natick, MA, USA
I am a Senior Robotics Research Scientist at MathWorks, working within the Advanced Research & Technology Office. My role focuses on bridging the gap between our commercially available technologies and cutting-edge research. I achieve this by conducting internal research, collaborating with academic researchers globally, and identifying and evaluating emerging research trends. My research interests include trajectory optimization, model predictive control, robotic manipulators, UAVs, and virtual reality simulation environments.
Previously, I served as a Research Scientist in the Robotics department at the Schlumberger-Doll Research Center. There, I developed and deployed robotic technologies for oil and gas field operations, with a focus on controlling robotic manipulators and autonomous aerial inspections.
I hold a Ph.D. in Mechanical Engineering (Robotics) from Northwestern University, specializing in real-time algorithms for symbol-based automation, particularly in real-time exploration and information acquisition for high-dimensional robots. Additionally, I earned an M.S. from Northwestern University, concentrating on human-in-the-loop assistive algorithms for rehabilitation therapy.
News
- May 2025: I presented a keynote during the ICRA Workshop on the Future of Intelligent Manufacturing about breaking barriers in developing and deploying Robotics software for intelligent manufacturing in modern industry. Slides coming soon!
- January 2025: Second year co-organizing the Robotic Grasping and Manipulation Competition at ICRA 2025 and this time with a brand new simulation-only track sponsored by MathWorks. Fun!
- June 2024: Second year in a row! Amir Patel, from my ICRA editorial team, won the ICRA 2024 Conference Editorial Board Outstanding Associate Editor award. So blessed to be leading this team.
- May 2024: I joined a team of wonderful researchers to co-organize the 9th Robotic Grasping and Manipulation Competition.
- June 2023: So happy that Andrew Sabelhaus, from my ICRA editorial team, won the ICRA 2023 Conference Editorial Board Outstanding Associate Editor award.
- February 2023: I was excited to serve as an Associate Editor for CCTA 2023 .
- September 2022: My 3-year term as an Editor for ICRA has just started. Looking forward to it!
- June 2022: Most grateful to have received the Outstanding Associate Editor award for ICRA 2022. What a pleasure to be working alongside valued colleagues! Here the full list of awardees.
- April 2022: Our IROS 2022 workshop proposal on "Robotic Systems Integration for Supply Chain Workflows: Design, Deploy, Execute" has been accepted!
- June 2021: Our paper entitled "An Application of Model Predictive Control to Reactive Motion Planning of Robot Manipulators" has been accepted for presentation at CASE 2021!
- May 2021: Our IROS 2021 workshop proposal on "Robotics for the Future of Factory Applications" has been accepted!
- February 2021: Our paper entitled "A Gradient-Based Approach for Coordinating Smart Vehicles and Traffic Lights" at Intersections" disseminating the work done by our 2020 summer interns at MathWorks has been accepted for publication at IEEE Control Systems Letters.
- March 2020: Our paper entitled "A Simulator for trading traffic privileges by selfish driving cars" disseminating the work done by our 2019 summer interns at MathWorks has been accepted for presentation at SpringSim 2020.
- November 2019: I was invited to present the industry keynote for the 17th Workshop on Domain-Specific Modeling at SPLASH 2019, entitled "A mosaic of models as the driver for Domain-Specific Modeling in the Robotics Industry". Find my slides here.
- October 2019: I was invited to serve at the Program Committee of L4DC 2020.
- September 2019: I have been appointed Chair of the IEEE Robotics and Automation Society (RAS), Boston Chapter for the academic year 2019-2020.
- August 2019: I was invited to serve as Associate Editor for ICRA 2020 working with Prof. Alex Dietrich as my editor.
Education
- Ph.D in Mechanical Engineering (Robotics), Northwestern University, 2017
Thesis: Real-Time Algorithms for Symbol-Based Automation , Advisor: Prof. Todd D. Murphey - Certificate in Management for Scientists and Engineers , Kellogg School of Management, Northwestern University, 2016
- M.S. in Mechanical Engineering (Robotics), Northwestern University, 2015
Thesis: Real-Time Assistive Balance Control in Low Bandwidth Computing Environments - B.S. in Electrical & Computer Engineering, University of Patras, 2012
Thesis: Design and Control of a Laparoscopic Redundant Surgical Tool, Advisor: Prof. Anthony Tzes
Publications
Journal Articles
- Anastasia Mavrommati, Emmanouil Tzorakoleftherakis, Ian Abraham and Todd D. Murphey, "Real-Time Area Coverage and Target Localization using Receding-Horizon Ergodic Control for Nonlinear Dynamics", IEEE Transactions on Robotics, 34(1), 62-80, 2018
- Anastasia Mavrommati, Jarvis A. Schultz and Todd D. Murphey, "Real-Time Dynamic Mode Scheduling Using Single-Integration Hybrid Optimization", IEEE Transactions on Automation Science and Engineering, vol.PP, no.99, pp.1-14, 2016
- Emmanouil Tzorakoleftherakis, Anastasia Mavrommati and Anthony Tzes, "Design and Implementation of a Binary Redundant Manipulator with Cascaded Modules", ASME Journal of Mechanisms and Robotics, 8(1):011002-011002-10, 2015
Peer-Reviewed Conference Proceedings
- Akshay Rajhans, Anastasia Mavrommati, Pieter J. Mosterman, and Roberto G. Valenti, "Specification and Runtime Verification of Temporal Assessments in Simulink", Runtime Verification, RV 2021.
- Anastasia Mavrommati, Roberto G. Valenti, Akshay Rajhans, and Pieter J. Mosterman, "An Application of Model Predictive Control to Reactive Motion Planning of Robot Manipulators," 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), 2021
- Manuel Rodriquez, Xiangxue Zhao, Hayley Song, Anastasia Mavrommati, Pieter J. Mosterman, Roberto G. Valenti, and Akshay Rajhans, "A Gradient-Based Approach for Coordinating Smart Vehicles and Traffic Lights at Intersections", IEEE Control Systems Letters, vol. 5, no. 6, pp. 2144-2149, 2021
- Zhan Tu, Anastasios Dimas, Mehmet Necip Kurt, Anastasia Mavrommati, Pieter J. Mosterman, Akshay Rajhans, and Roberto G. Valenti, "A Simulator For Trading Traffic Privileges by Selfish Driving Cars", SpringSim, 2020
- Ahalya Prabhakar, Anastasia Mavrommati, Jarvis Schultz, and Todd D. Murphey, "Autonomous Visual Rendering using Physical Motion", Algorithmic Foundations of Robotics XII (pp. 80-95), Springer, 2020
- Ian Abraham, Anastasia Mavrommati, and Todd D. Murphey, "Data-Driven Measurement Models for Active Localization in Sparse Environments", Robotics: Science and Systems (RSS), 2018
- Anastasia Mavrommati and Todd D. Murphey, "Automatic Synthesis of Control Alphabet Policies", (accepted at IEEE Conference on Automation Science and Engineering), 2016
- Anastasia Mavrommati, Alex Ansari and Todd D. Murphey, "Optimal Control-On-Request: An Application in Real-Time Assistive Balance Control", IEEE International Conference on Robotics and Automation (ICRA), pp. 5928-5934, 2015
- Anastasia Mavrommati and Todd D. Murphey, "Single-Integration Mode Scheduling for Linear Time-Varying Switched Systems", American Control Conference (ACC), pp. 3948-3953, 2014
- Anastasia Mavrommati, Emmanouil Tzorakoleftherakis and Anthony Tzes, "Design and Development of a Hyper-Redundant Binary Active Laparoscopic Manipulator", IEEE Mediterranean Conference on Control & Automation (MED), pp. 327-332, 2012
Book Chapters
- Anastasia Mavrommati, Alex Ansari and Todd D. Murphey, "Assistive Optimal Control-on-Request with an Application in Standing Balance Control and Reinforcement", Trends in Control and Decision-Making for Human-Robot Collaboration Systems, Springer, 2016 (to appear)
Service & Teaching
Chair
- Chair of the IEEE Robotics and Automation Society (RAS), Boston Chapter: 2019 - 2020
- Chair and co-organizer of the MathWorks Research Summit: 2019-2025
- Editor, IEEE International Conference on Robotics and Automation (ICRA), 2023-now
- Advisory Board Member, Robotics Engineering, Worcester Polytechnic Institute (WPI), 2023-now
- Associate Editor, IEEE Conference on Control Technology and Applications (CCTA), 2023-now
- Associate Editor, IEEE International Conference on Robotics and Automation (ICRA), 2020-2022
- Program Committee Member, 2nd Annual Conference on Learning for Dynamics and Control (L4DC), 2020-2022
- IEEE Transactions on Mechatronics
- IEEE Conference on Decision and Control (CDC)
- IEEE Conference on Robotics and Automation (ICRA)
- IEEE Robotics and Automation Letters (RAL)
- Theory of Machines - Dynamics, Northwestern University: [Fall 2014, Fall 2015]
- Everything is the same: Modeled Systems, Massive Open Online Course (MOOC) at Coursera: [Fall 2013, Spring 2014]
- Robotic demonstrations to general audience, Museum of Science and Industry, Chicago, IL, USA: [National Robotics Week 2013-2016]
Selected Research Projects
Real-Time Area Coverage and Target Localization using Receding-Horizon Ergodic Control
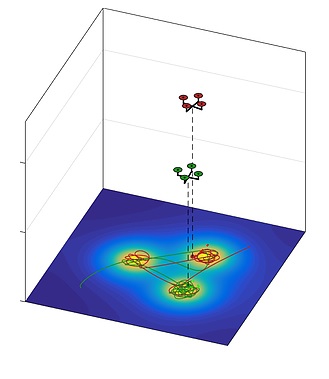
This work introduces ergodic iterative Sequential Action Control (iSAC), a model predictive control algorithm for real-time terrain exploration and target localization for nonlinear systems. Ergodic iSAC uses a nonlinear model to control the agent so that the amount of time spent in any given area of the search domain is proportional to the integral of a spatial distribution over that same domain (ergodicity). The algorithm employs hybrid control theory to compute a single control action that optimally improves the ergodic cost at each time step using a receding time horizon. For purposes of terrain exploration/coverage, the area spatial distribution may encode probability of detection in operations such as search-and-rescue, surveillance, hazard detection structures or sites inspection and agricultural spraying. For target localization, the spatial distribution indicates the expected information density (EID), calculated as the expected value of the Fisher Information based on the measurement model for the target. All following examples are coded in C++ and run in real time. See more examples here.
One of the benefits of this approach is that it can generate trajectories that achieve both exploration and target localization, for cases when the number of targets is unknown. The above video shows two quadrotors (i.e. agents) simultaneously exploring a terrain and localizing random moving targets using ergodic iSAC. Here, the terrain spatial distribution indicates both probability of detection (for exploration) and the expected information density (EID) (for localization). The expected information density (EID) is calculated as the expected value of the Fisher Information based on the measurement model and the targets belief. For target localization, the agent can take bearing-only measurements using an attached gimballed camera always pointing at the direction of gravity. We use an Extended Kalman Filter (EKF) for updating the target's position estimate. We assume no prior behavior model of the targets motion is available.